
TECHNOLOGIE
EPI "De La Terre à Mars"
Présentation
Pour comprendre le projet InSight :
Les actualités de la mission :
Réplique de l'attérisseur InSight :
Activité 01
Objectif :
-
Identifier le besoin de créer la sonde Insight
-
Identifier les fonctions de service de la sonde
-
Identifier une contrainte de réalisation de la sonde
Travail :
Rédiger sur une feuille les réponses au questions suivantes :
-
Formuler le besoin de la sonde Insight en utilisant l'outil graphique "Bête à cornes".
-
Lister trois fonctions de service de la sonde Insight.
-
Donner un exemple de contrainte à respecter lors de la réalisation de la sonde Insight.
S'aider des informations données ci-dessus :
-
site du CNES
-
vidéo "Insight, le sismomètre français SEIS"
-
vidéo "SEIS, le sismomètre d'Insight, mis à rude épreuve à Toulouse"
Remarque :
La rédaction doit respecter la présentation suivante :
-
Titre : EPI de la Terre à Mars - Projet Insight
-
En haut à gauche : NOM, Prénom, classe
-
En haut à droite : date
-
Faire apparaître les sous titres :
Activité 01
-
Besoin
-
Fonctions de service
-
Contrainte
Activité 02
Objectif :
-
Identifier l'organisation du projet "ELYSIUM"
-
Exprimer cette organisation par une carte mentale
Travail :
Exprimer sous forme de carte mentale la démarche du projet "ELYSIUM : InSight la réplique".
-
Rédiger sur une feuille en respectant la présentation proposée ci-dessous.
-
S'aider de la vidéo "ELYSIUM : InSight la réplique" dans la partie présentation
- S'aider de la vidéo ci-contre "Comment construire une carte mentale"
Présentation :
-
Titre : EPI de la Terre à Mars - Projet Insight
-
En haut à gauche : NOM, Prénom, classe
-
En haut à droite : date
-
Faire apparaître le sous titre :
Activité 02 - Comment s'organise un projet ?
Objectif :
-
Associer des solutions techniques de la sonde Insight à ses fonctions techniques
Travail :
-
A l'aide de la vidéo "ELYSIUM en 3D" (voir ci-dessus partie présentation), compléter le tableau de la partie "Nomenclature" du document
-
A l'aide des informations de la première page du site du CNES sur le projet Insight, compléter la deuxième partie du document "Analyse fonctionnelle" en mentionnant les solutions techniques notées dans la nomenclature
Activité 03
EPI de la Terre à Mars
Activité 03
Analyse fonctionnelle
Activité 04
Objectif :
-
Imaginer et formaliser une procédure d'assemblage d'une partie de la maquette du bras de déploiement de la sonde
-
Exprimer cette procédure à l'aide d'outils adaptés
-
Utiliser une modélisation pour formaliser l'assemblage
Présentation :
La première image ci-contre représente la maquette du bras de déploiement de la sonde.
La deuxième image représente le sous-ensemble "avant-bras" de cette maquette avec au dessous la nomenclature.
Ce sous-ensemble est constitué de 20 pièces.
Travail :
Partie 1
-
Assembler le sous-ensemble "avant-bras" en prenant soin des différentes pièces
-
Noter au brouillon avec la technique descriptive de votre choix, la chronologie de l'assemblage
Sont fournis :
-
les 20 pièces du sous-ensemble "avant-bras"
-
le fichier "av_bras_robot.skp" correspondant à la modélisation sous Sketchup du sous-ensemble "avant-bras"
Partie 2
Mettre au propre le brouillon réalisé en partie 1.
Ce travail peut se faire de façon manuscrite ou en utilisant un outil informatique.
Partie 3
Modifier la modélisation numérique du sous-ensemble "avant-bras" de façon à faire apparaître une vue éclatée de l'ensemble afin de comprendre l'assemblage de la structure.



Activité 05
Objectif :
-
Modéliser numériquement une pièce de la maquette du bras de la sonde
-
Assembler la pièce réalisée dans son ensemble
Travail :
Il manque sur le modèle numérique fourni de la maquette du bras (act05_bras_robot.skp) deux entretoises identiques.
Le travail consiste à :
-
modéliser une entretoise en respectant les dimensions (voir image ci-dessus, épaisseur : 3mm) puis de la sauvegarder
-
importer l'entretoise dans la modélisation de l'ensemble et la placer correctement
Conseils :
-
démarrer "SketchUp 2016" avec le modèle type "Architecture - Millimètres"
-
afficher la barre d'outils "Grand jeu d'outils" (Menu Affichage > Barre d'outils...)
-
régler la précision à 0,00mm (Menu Fenêtre > Infos sur le modèle > Unités)

Activité 06
Objectif :
-
Modéliser un instrument (SEIS ou HP3) et utiliser cette modélisation pour construire cet instrument
Travail :
-
Modéliser sommairement avec le logiciel "SketchUp 2016", un instrument au choix en suivant les contraintes ci-dessous
-
Exporter la modélisation en fichier "stl" (fichier de stéréolithographie)
-
Imprimer en 3D ce fichier
Contraintes :


SEIS
Le modèle doit contenir dans un pavé de base carré de 30 mm de coté et de hauteur 25 mm.
La forme du modèle doit être de type conique afin de rentrer dans le bouclier.
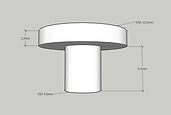
La partie supérieure doit respecter les dimensions précisées ci-dessous.
HP3
Le modèle doit contenir dans un cube de 30 mm de coté.
La partie supérieure doit respecter les dimensions précisées ci-dessous.
Partie supérieure
-
Disque : diamètre = 12 mm; hauteur = 2 mm
-
Tige : diamètre = 5 mm; hauteur = 6 mm
Activité 07
Objectif :
-
Analyser le comportement attendu du bras de déploiement de la sonde Insight
-
Décomposer ce comportement en sous comportement afin de structurer un programme de commande
Travail :
-
A partir de la vidéo "ELISYUM en 3D" de la partie présentation ci-dessus, lister chronologiquement les différentes actions qui doivent être réalisées pour déployer les instruments. Les actions listées commenceront par un verbe à l'infinitif.
-
Décomposer la liste des actions en sous liste afin de structurer un programme de commande
Présentation :
-
Titre : EPI de la Terre à Mars - Projet Insight
-
En haut à gauche : NOM, Prénom, classe
-
En haut à droite : date
-
Faire apparaître les sous titres :
Activité 07
-
Comportement attendu
-
Décomposition du comportement
Activité 08
Objectif :
-
Ecrire, mettre au point (tester et corriger) et exécuter un programme commandant la maquette du bras de déploiement
-
Vérifier le comportement attendu
Travail :
Partie 1 - Commande d'un servomoteur
Le travail consiste à programmer la carte « Arduino Uno » avec le logiciel « mBlock » pour commander un servomoteur de type « S3003 » en suivant les contraintes ci-dessous :
-
comportement attendu du servomoteur :
-
positionner le servomoteur à 20° avec une vitesse faible (5)
-
attendre 4 secondes
-
positionner le servomoteur à 160° avec une vitesse forte (75)
-
attendre 1 seconde
-
répéter indéfiniment depuis le début
-
-
le servomoteur sera commandé par la broche D2 de la carte Arduino
Matériel à disposition :
Processus à respecter pour réaliser correctement le travail :
Mettre les 9 actions suivantes dans l'ordre.
-
Connecter la carte Arduino et téléverser le programme
-
Brancher le servomoteur à la carte Arduino
-
Lancer le logiciel mBlock
-
Brancher le câble USB à l'ordinateur
-
Vérifier le comportement du servomoteur
-
Configurer le logiciel mBlock
-
Saisir le programme avec le logiciel mBlock
-
Allumer l'ordinateur
-
Brancher le câble USB à la carte Arduino
Remarque :
Pour des raisons de sécurité, on connecte la carte Arduino en suivant cet ordre :
-
En premier on connecte la carte avec son environnement (moteurs, bouton poussoir...)
-
On appelle le professeur pour vérifier le branchement ( IMPERATIF )
-
Ensuite on connecte la carte Arduino à l'ordinateur par le câble USB relié à l'ordinateur.
Qu'est ce qu'un SERVOMOTEUR ?
Un servomoteur est un actionneur (système produisant une action). C'est un moteur électrique capable de se placer dans une position et de la maintenir. La position est définie par une commande correspond à une position angulaire. Cette position est comprise entre 0° et 180°. La commande permet aussi de définir la vitesse de déplacement du servomoteur.
Pour éviter de détériorer le servomoteur, une marge de sécurité sera appliquée : commande entre 10° et 170°.
Instruction de la bibliothèque "Pilotage" de mblock
permettant de commander un servomoteur :

-
Ordinateur
-
Logiciel mBlock
-
Câble USB type A/B
-
Carte Arduino Uno + carte de connexion Grove
-
Câble Grove
-
Servomoteur type S3003
A compléter dans le document réponse :
EPI De la Terre à Mars
Partie 1 Commande d'un servomoteur
Pour compléter correctement, Il faudra tenir compte de la remarque ci-dessous.

EPI de la Terre à Mars
Activité 08 - Partie 1
Commande d'un servomoteur

En bref, ce que tu dois faire pour cette partie 1 :
-
Compléter la partie "Processus à respecter" du document
-
Ecrire le programme avec mBlock
-
Compléter le câblage du servomoteur à la carte Arduino sur le document
-
Câbler le servomoteur à la carte Arduino
-
Faire vérifier par le professeur
-
Téléverser le programme et vérifier le fonctionnement
Partie 2 - Commande d'un servomoteur par bouton poussoir
Le travail consiste à programmer la carte « Arduino Uno » avec le logiciel « mBlock » pour commander un servomoteur de type « S3003 » en suivant les contraintes ci-dessous :
-
comportement attendu du servomoteur :
-
Ne rien faire si le bouton poussoir n'est pas actionné
-
Lorsque le bouton poussoir est actionné faire les actions ci-dessous
-
positionner le servomoteur à 20° avec une vitesse faible (5)
-
attendre 4 secondes
-
positionner le servomoteur à 160° avec une vitesse forte (75)
-
attendre 1 seconde
-
répéter indéfiniment depuis le début
-
-
le servomoteur sera commandé par la broche D2 de la carte Arduino
-
le bouton poussoir sera connecté à la broche D6 de la carte Arduino
Matériel à disposition :
Au matériel précédent est rajouté un bouton poussoir :

Remarque sur le bouton poussoir
Le bouton poussoir envoie à la carte
une valeur 0 ou 1 en fonction de l'appui :
-
bouton non actionné > 0
-
bouton actionné > 1
Pour tenir compte de l'état du bouton poussoir dans un programme mBlock, on peut utiliser les instructions suivantes :
( de la bibliothèque "Pilotage / Arduino" )
0 ou 1
( de la bibliothèque "Opérateur" )
pour connaitre la valeur donnée par le bouton poussoir connecté à une broche de la carte Arduino
pour comparer à 0 ou 1, la valeur donnée par le bouton poussoir
Cet ensemble d'instruction pourra alors être utilisé dans une instruction de type "attendre jusqu'à < >" ou "si < > alors" de la bibliothèque "Contrôle".

En bref, ce que tu dois faire pour cette partie 2 :
-
Ecrire le programme avec mBlock
-
Câbler le servomoteur et le bouton poussoir à la carte Arduino
-
Faire vérifier par le professeur
-
Téléverser le programme et vérifier le fonctionnement

Position de SEIS (base) :
-
PosSeis1
-
PosSeis2
-
PosSeis3
Position 1 (sol martien) :
-
PosSol11
-
PosSol12
-
PosSol13
Position du Bouclier (base) :
-
PosBouclier1
-
PosBouclier2
-
PosBouclier3
Position 2 (sol martien) :
-
PosSol21
-
PosSol22
-
PosSol23
Position de HP3 (base) :
-
PosHp31
-
PosHp32
-
PosHp33
Position initiale (bras) :
-
PosInit1
-
PosInit2
-
PosInit3

90°
130°
60°
50°
80°
160°
30°
80°
160°
10°
80°
160°
170°
40°
140°
140°
40°
150°

Partie 3 - Commande de la maquette du bras de déploiement
Le travail consiste à programmer la carte « Arduino Uno » avec le logiciel « mBlock » pour commander la maquette du bras de déploiement de la sonde Insight en suivant les contraintes ci-dessous :
-
comportement attendu du bras :
-
doit simuler le déploiement des objets avec une action séquentielle des servomoteurs (l'un après l'autre)
-
le déploiement des instruments commence lorsque le bouton poussoir est actionné
-
les actions "Serrer la pince" et "Lâcher la pince" seront remplacées par une pause de 4 secondes
-
les différentes positions sont données par le tableau ci-dessous :
-
-
les servomoteurs seront commandés par les broches suivantes de la carte Arduino :
-
D2 --> servomoteur 1
-
D3 --> servomoteur 2
-
D4 --> servomoteur 3
-
-
le bouton poussoir sera connecté à la broche D6 de la carte Arduino
Remarque sur le déploiement des instruments
Lors d’un déploiement, le bras se déplace successivement :
-
du haut vers le bas (position initiale vers base)
-
du bas vers le haut (base vers position initiale)
-
du haut vers le bas (position initiale vers sol martien)
-
du bas vers le haut (sol martien vers position initiale)
Il y a donc 2 types de déplacement :
-
Un déplacement vers le bas : « DéplacerBas » (de la position initiale vers le bas)
(Actions des servomoteurs : en premier le servo1, puis le servo2 et ensuite le servo3)
-
Un déplacement vers le haut : « DéplacerHaut » (de la position basse vers le haut)
(Actions des servomoteurs : en premier le servo3, puis le servo2 et ensuite le servo1)
Remarque sur le programme
Pour rester « lisible », le programme principal doit faire appel à des sous-programmes.
De plus des variables seront utilisées.
Les différentes positions angulaires des servomoteurs respectifs 1, 2 et 3 permettant de positionner le bras, seront définies par les variables suivantes :
Amélioration du programme
Le programme peut être amélioré en utilisant 2 vitesses de déplacement du bras :
-
une vitesse plus rapide lors de déplacement à vide
-
une vitesse plus lente lors de déplacement en charge
Deux variables supplémentaires doivent être utilisées : VitGrande et VitPetite
Matériel à disposition :
Activité 09
Objectif :
-
Identifier les flux d'énergie et d'information sur la maquette du bras de déploiement
Travail :

Activité 10
Objectif :
-
Imaginer une solution technique réalisant la pince de la maquette du bras
-
Réaliser de manière collaborative, le prototype de la pince de la maquette du bras pour valider la solution retenue
Contraintes :
-
La pince sera constituée de deux mâchoires et respectera le principe de préhension de la pince réelle
-
La pince devra se diriger vers le bas quelque soit la position de l'avant bras
-
L'action de la pince sera réalisée à distance par un actionneur fixé sur la base du bras